Included in this page is my contributions to my senior design project for WTCC.
The prompt for the project was to design a functional robotic arm from scratch, capable of moving an object from one location to another.
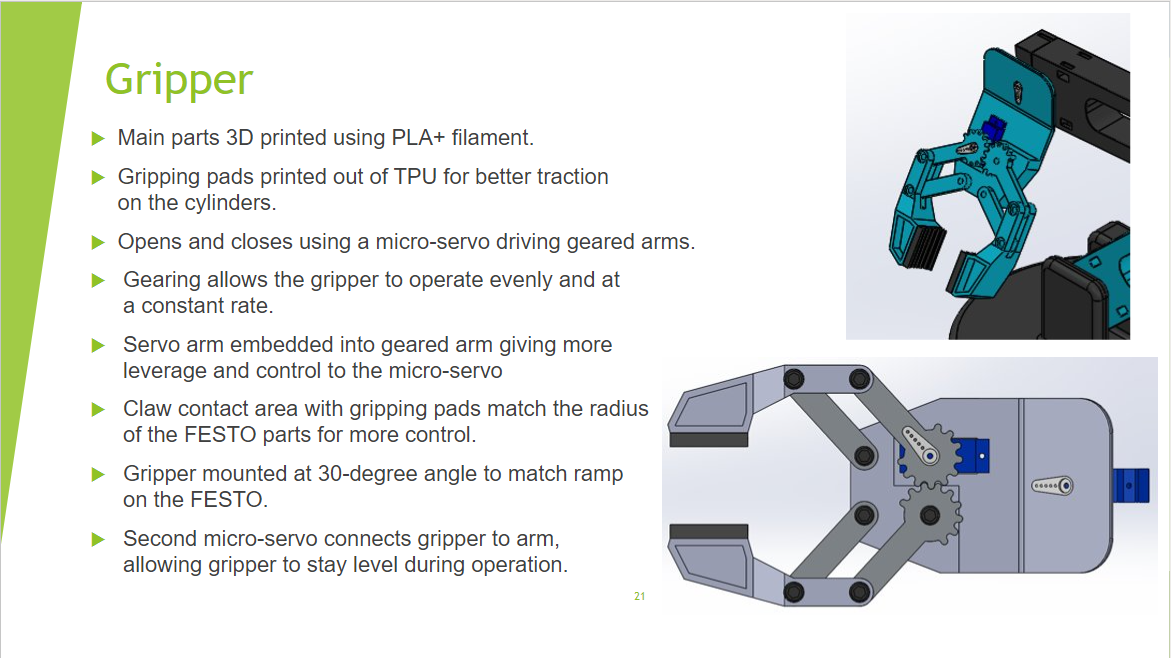
My assignment was to design the gripping mechanism, the details of which are below.
The prompt for the project was to design a functional robotic arm from scratch, capable of moving an object from one location to another.
My assignment was to design the gripping mechanism, the details of which are below.
|
|
This is the first revision of the gripping mechanism.
This claw was designed to function similar to bicycle handbrakes. It would have a cable attached to a servomotor, which would cause tension, closing the gripper. When the tension is released, a spring would return to its open position. |
|
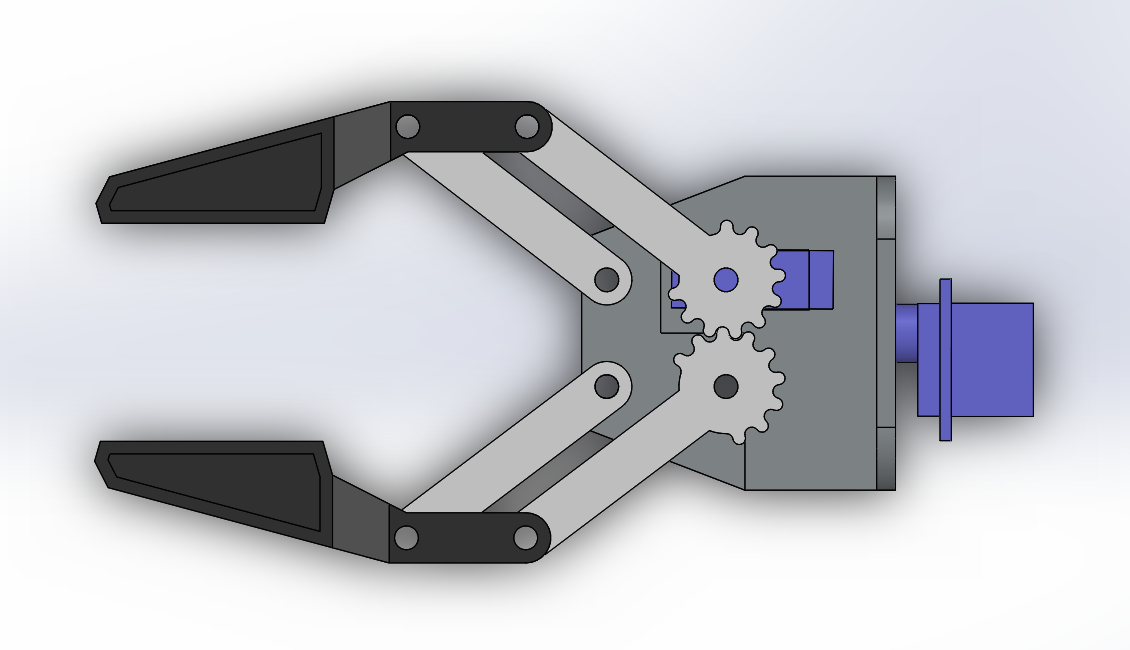
After scrapping the initial design, this is the second design which utilizes two micro-servomotors. One servo is used to open and close the claws, and the other is used to provide rotational motion.
|
|
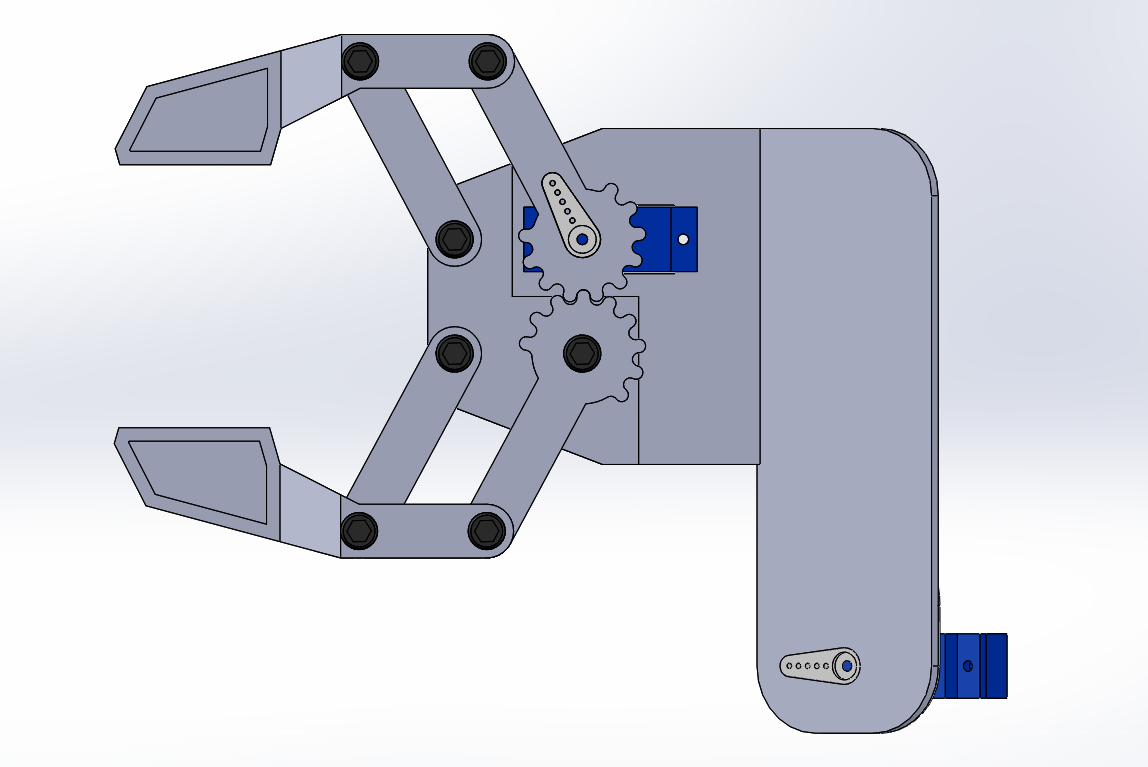
This design functions the same as the previous design, but has a few smaller design changes to experiment with different functionalities.
|
|
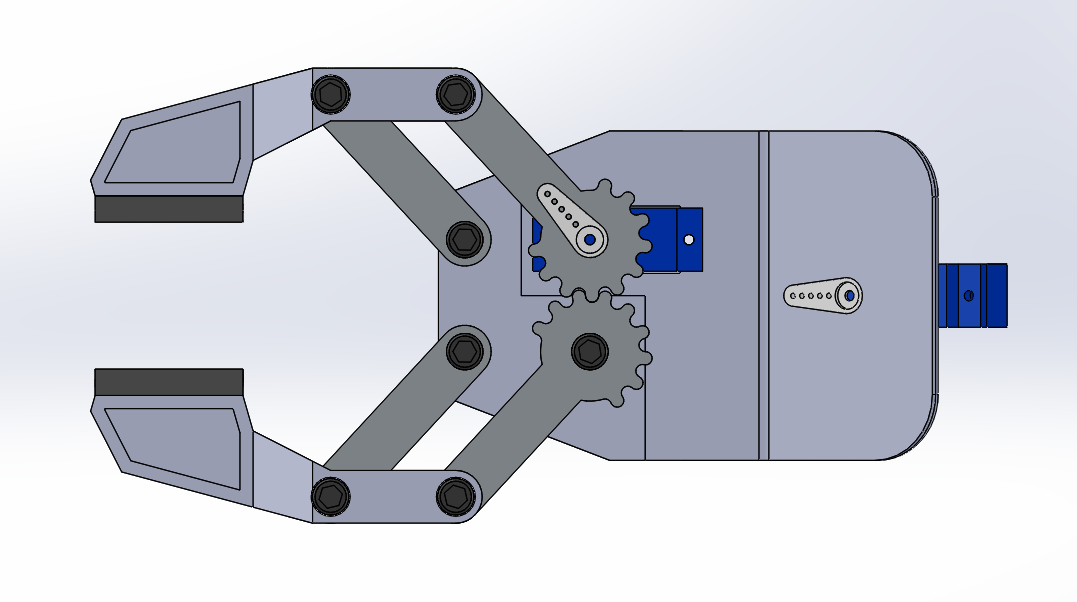
This is the final design for the gripping mechanism, which functions the same as the previous design. This design is the culmination of weeks of testing and perfecting. While it doesn't look like it changed much from the previous design, the tolerances have been adjusted in order to maximize functionality.
|